TurtleBot3 Simulation for Operational Robotics
Overview
TurtleBot3 is a compact, ROS 2-compatible robot platform that supports both real-world and simulated deployment. Its modularity and low barrier to entry make it suitable for prototyping advanced autonomy, testing in virtual environments, and building operational readiness in a wide range of mission scenarios. When integrated with Gazebo and RViz2 in ROS 2 Humble, TurtleBot3 becomes a complete development and training tool that replicates real-world robotics missions, including those involving perception, mapping, and autonomous navigation in complex, interference-prone environments.
Realistic Virtual Environments with Sensor Fidelity
The system includes a full suite of virtualized sensors:
- 360° LiDAR (LDS-01)
- IMU (Inertial Measurement Unit)
- Camera (for supported models)
These enable simulated perception tasks like obstacle avoidance, SLAM, and goal-based navigation. Environments can be customized or selected from built-in simulation worlds, such as:
- Minimalistic test space (
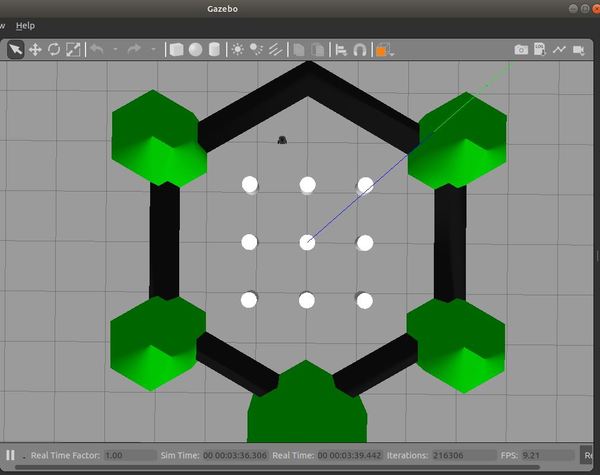
empty_world) - Structured obstacle-rich interior (
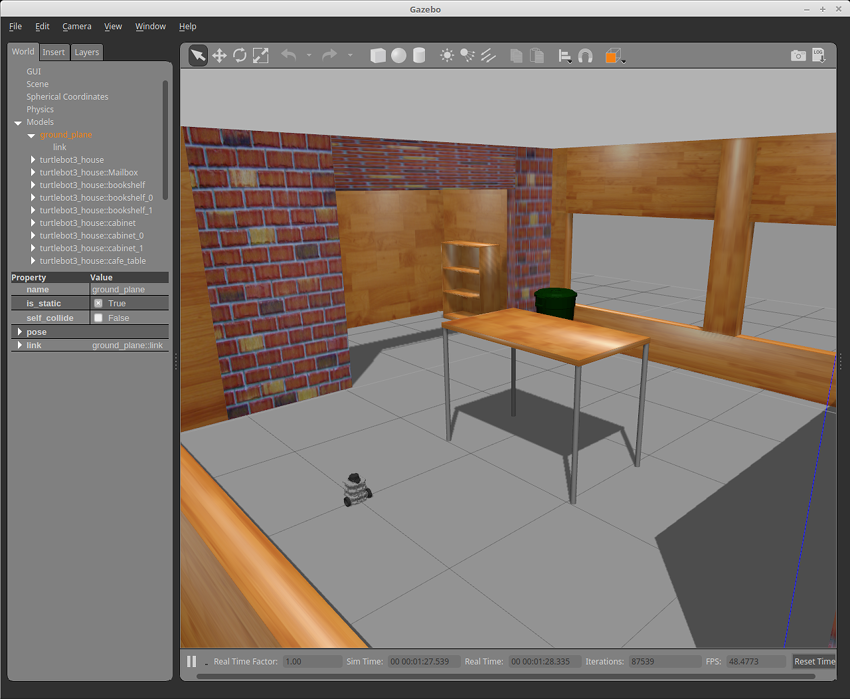
turtlebot3_world) - Complex domestic layout (
turtlebot3_house)
These environments provide varied terrain and layouts that mirror real-world navigation challenges, making the simulation platform ideal for exploring robot behavior under shifting signal conditions and environmental constraints.